Кошмар владельцев квадрокоптеров добрался и до меня. :-)
Был на льду Ершовского залива Иркутского водохранилища. Решил поснимать вид на
трассу сверху своим
Phantom 2 Vision+. Все делал как сам
рекомендую. Калибровал компас, дождался определения 7 спутников, проверил стабильность полета.
Был ветер. Не такой уж и легкий, но доводилось летать и при более сильном. В ручном режиме коптер летал стабильно во всех направлениях. Было видно 9 спутников.
Отснял кадры и перешел, как обычно, в режим возврата домой (правым тумблером вниз: использую режим Naza). Коптер повернулся передом к месту взлета (это было видно по передаваемой картинке). Но почему-то расстояние до точки взлета стало не уменьшаться, а возрастать. Довольно шустро он начал удаляться от меня.
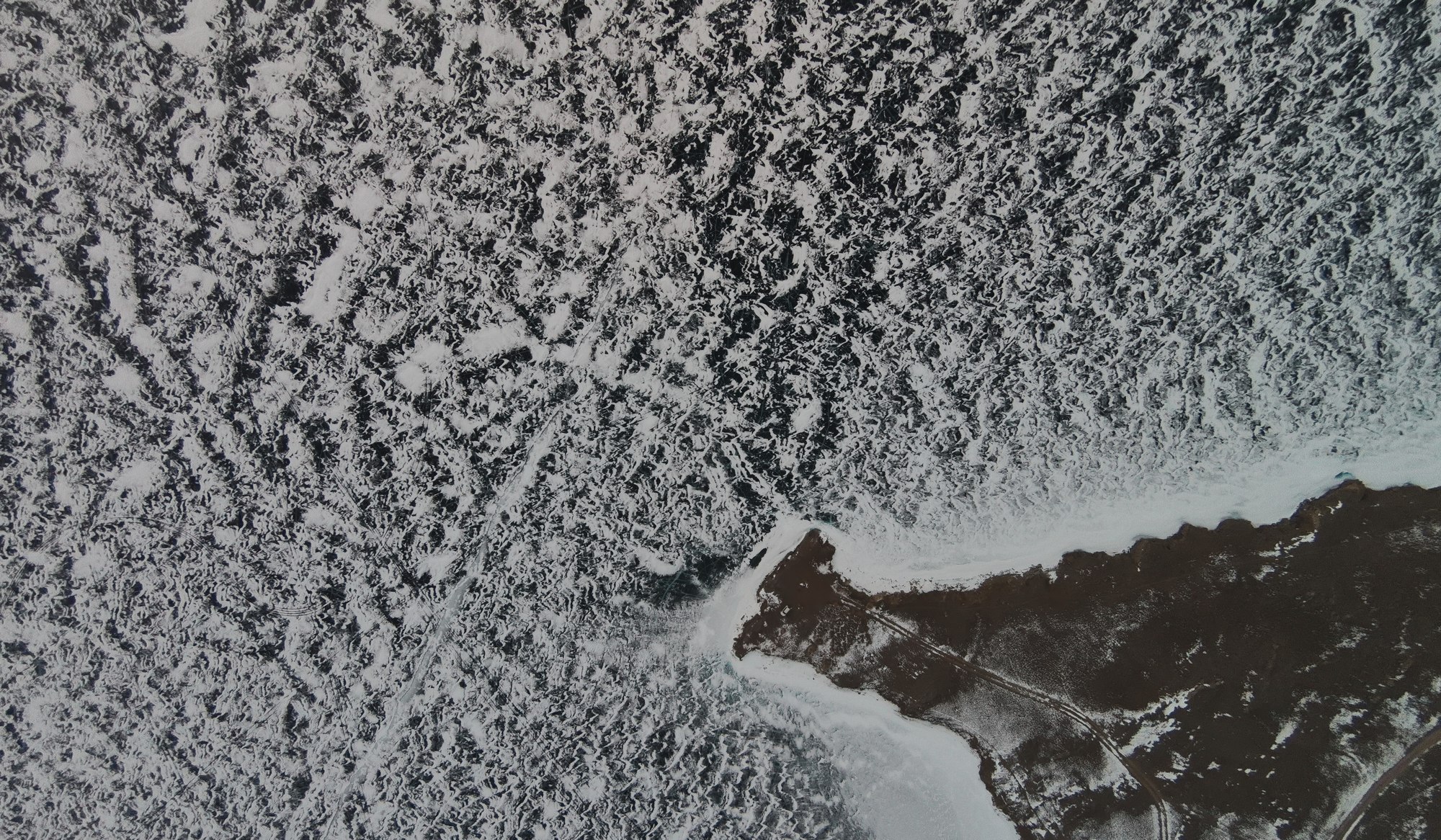
Щелкаю правым тумблером вверх (режим ручного управления с GPS), но коптер не реагирует (он всегда как-то заторможено на это реагирует), а через некоторое время пропадает и сигнал. Последняя картинка, что передал коптер:

По ней видно, что коптер уже умотал за мыс лесопитомника и стремительно уходил в сторону Иркутска. А камера (т.е. перед коптера) все так же повернута к месту взлета.
Прыгаю в машину, по льду объезжаю мыс и пытаюсь поймать сигнал. Сигнал сперва то появлялся, то исчезал (установка соединения с этим коптером через Wi-Fi очень-очень медленная), но новой картинки не было. Потом сигнал исчез совсем.
Проехался по льду почти до Якоби и обратно, смотрел коптер насколько мог. Естественно, так сходу его найти на такой площади было нереально. Мне нужно было уезжать, поэтому мысленно попрощался с квадрокоптером и покинул лед. Нда, весело!
Немного позже в спокойной обстановке посмотрел спутниковые снимки. Исходил из предположений:
1. Раз коптер улетал, хоть и не туда, значит моторы работали нормально, он не рухнул сразу вниз.
2. Коптер улетал без изменения азимута.
3. Аккумулятор не бесконечный, заряда было мало, коптер должен был совершить автоматическую посадку.
Примерно определил место последней переданной картинки. Задал направление, отметил в мобильном телефоне точки. И решил вернуться на лед, поставить машину и пешком идти искать коптер в снегу на льду Иркутского водохранилища.
В этот же день через несколько часов вернулся и пошел искать, хоть особой надежды и не было: коптер маленький и белый, возможная площадь большая. Да и не факт, что он куда-нибудь на деревья не упал. Жалко, что бинокль остался в другой машине.

(где-то там может быть коптер)
Снег был с настом, но неглубокий. Пешком можно было идти. Выбрал направление и выдвинулся. Когда пошел, то заметил, что выбранное направление совпадает с направлением ветра.
Безрезультатно прошел около 1 км, решил пройти еще немного и возвращаться, но по другой дуге. И вдруг вижу вдали подозрительный предмет :-)

Подбегаю ближе. Ура, это мой блудный коптер!

Все предположения подтвердились. Хотя это дикое везение и удача, что вышел практически точно на коптер. Как видно по его положению (лучи с красными метками обозначают перед), он так и улетал задом наперед. Сам коптер успешно совершил посадку в снег без внешних повреждений. Его не успело замести снегом.
Составил примерную схему на основе спутникового снимка bing (он весенний, поэтому более соответствует виду сверху):

Коптер успел улететь от места взлета примерно на 2.5 км. Улетал он задом наперед строго по ветру. Я не понимаю причину такого поведения! Его сдуло, его моторы не могли противостоять ветру? Но перед этим он отлично летал во всех направлениях в ручном (GPS) режиме! И уносить его начало только после перехода в режим возврата. И улетал он на максимальной скорости. Представляется мне, что это какая-то софтварная недоработка. Продукция DJI вообще склонна к самостоятельным безвозвратным улетам.
Сам квадрокоптер цел. Включается и работает. Но летать еще не пробовал. Что-то после таких фокусов доверие к нему здорово подорвано.
P.S. Еще напомню про существование функции "Find My PHANTOM...", которая почему-то расположена в разделе Settings мобильного приложения DJI VISION. Хоть она показывает только карту Google, но при наличии связи может помочь найти улетевший коптер. Но в моем случае функция была бесполезна - там показывалась позиция, с которой передана последняя картинка.